Boko Media
Tools for working at sea
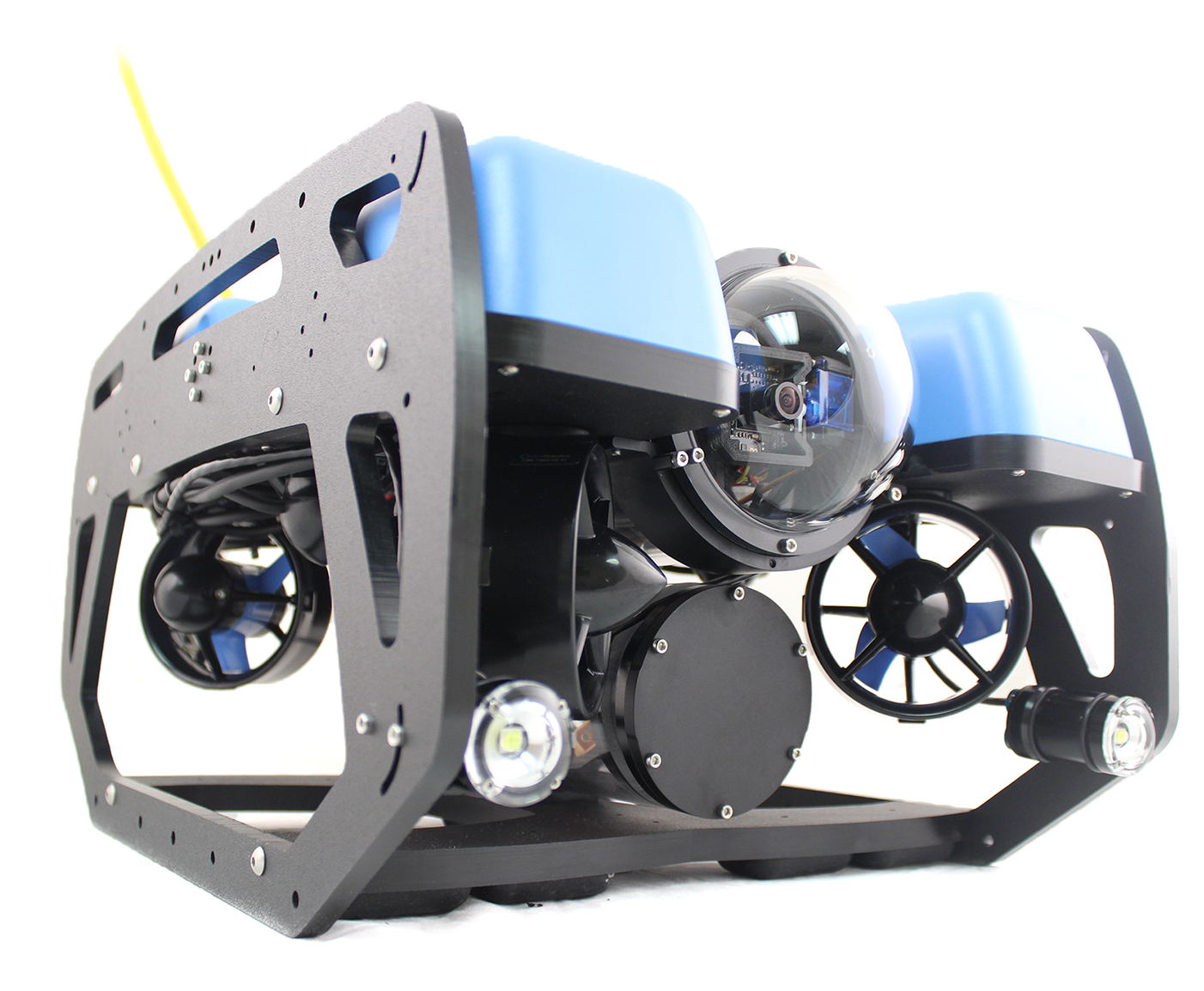
ROVSurveys, identification, inspection, sampling, recovery, filming
Perfect to investigate Sonar or Sidescan findings
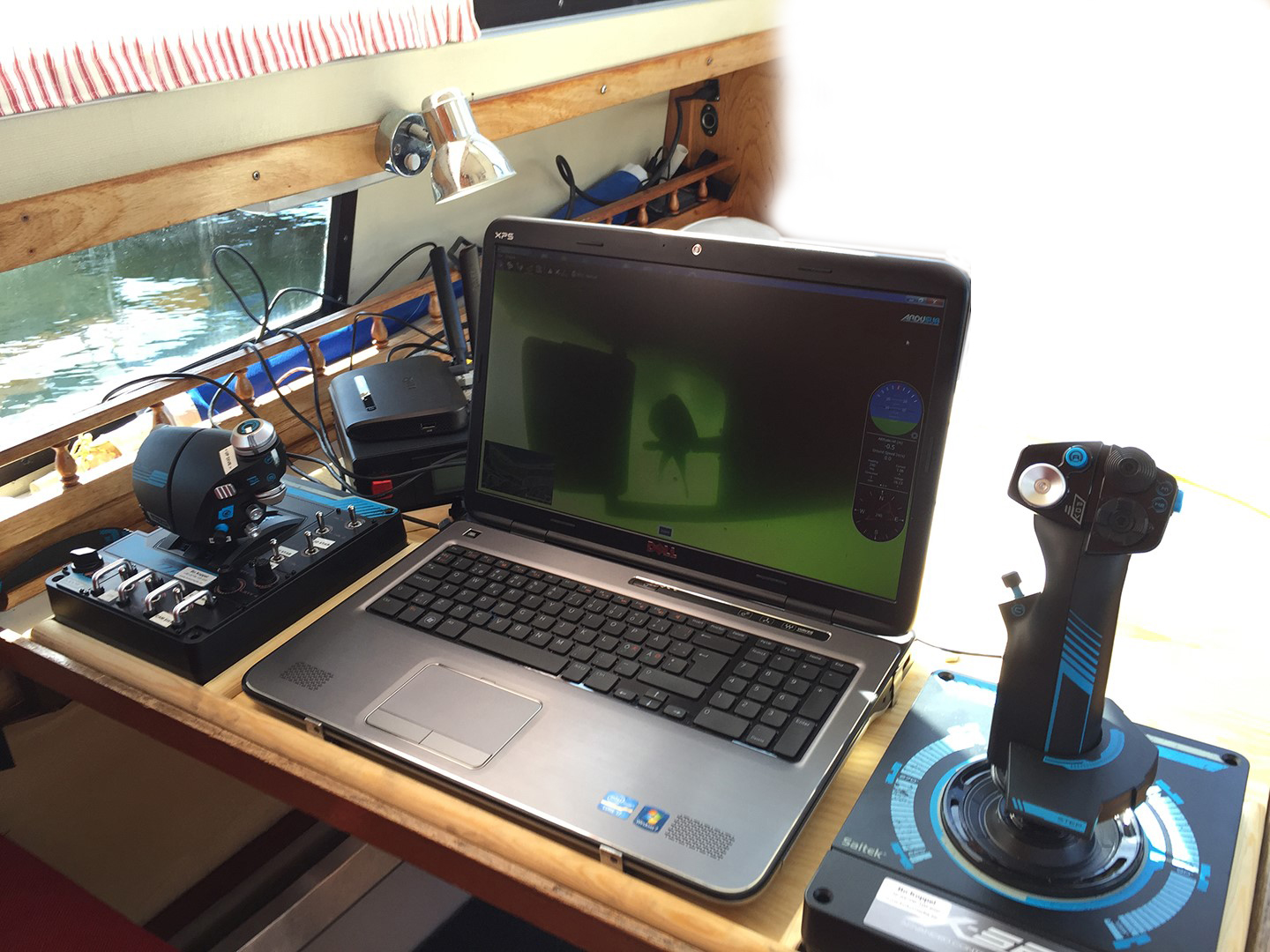
Control from computer and ergonomic joysticks:
Positioning system for underwater positions
and allowing ship to follow ROV:
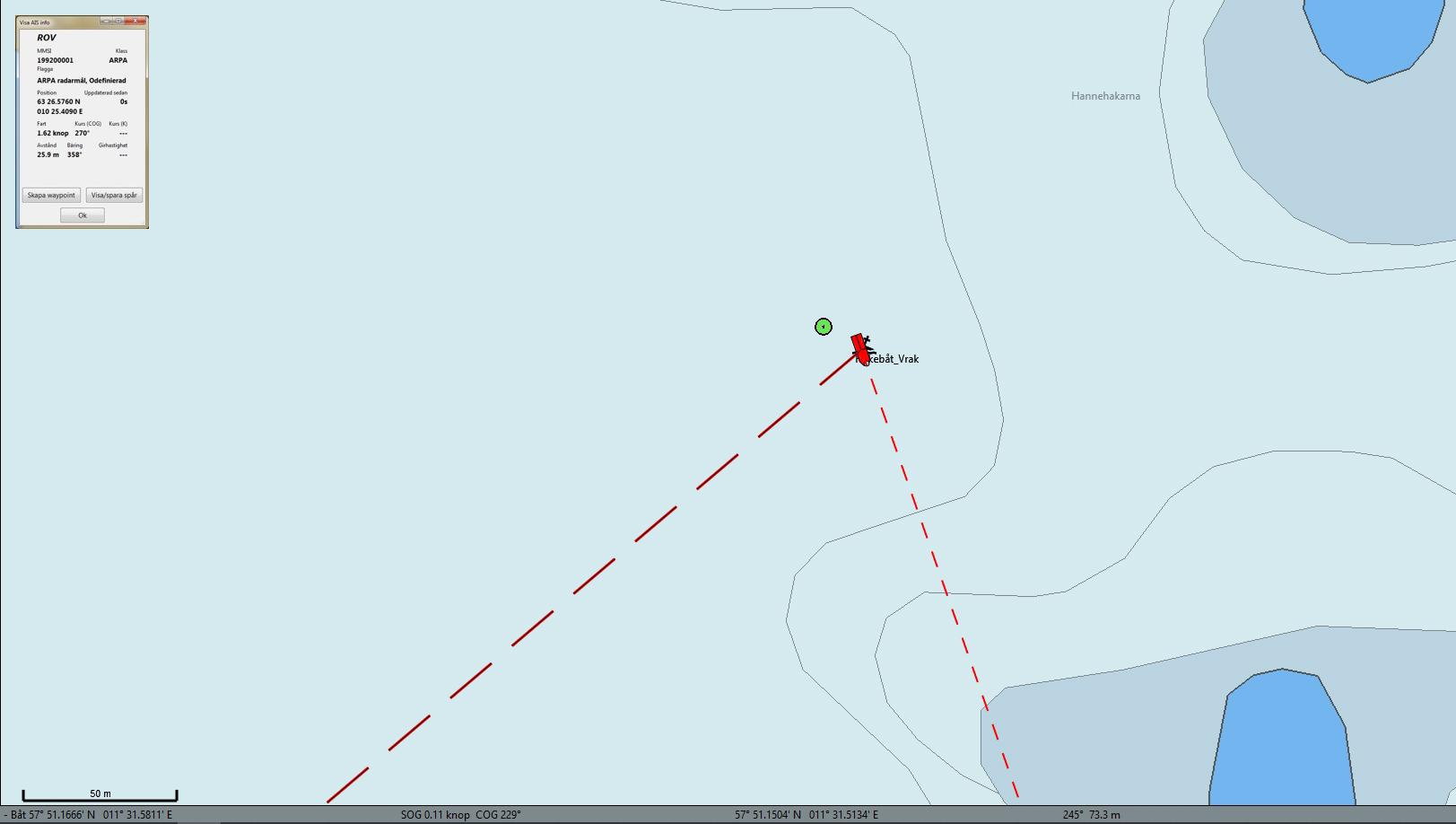
System for navigating ship after ROV, using ROV
and sensors:

Gripper for recovery or release of objects:

Max workdepth
Camera Full HD 1080x1920 with recording
Manipulator/gripper
Instruments: Scanning Sonar, INS, Accelerometers, Depthmeter, tempmeter, Laser
Scaler
Underwater positioning, SBL system to position the ROV within 1 meter:
Get position of ROV, Move ROV to position, move ship after ROV
Thruster power 14 kg, Speed
over 2 knots
Lights 2 x 1 500
lumens, with dimmer
Control modes: manual, heading, depth, stabilized
Electric power: 240 V AC from surface, or LiPo acc onboard
Maneuvering
ship following ROV gives possibilities
Easy to survey long distances
More precision in finding sites to investigate
Ship handles most of surface currents, and less cable in water
Possibility to hang equipment from ship
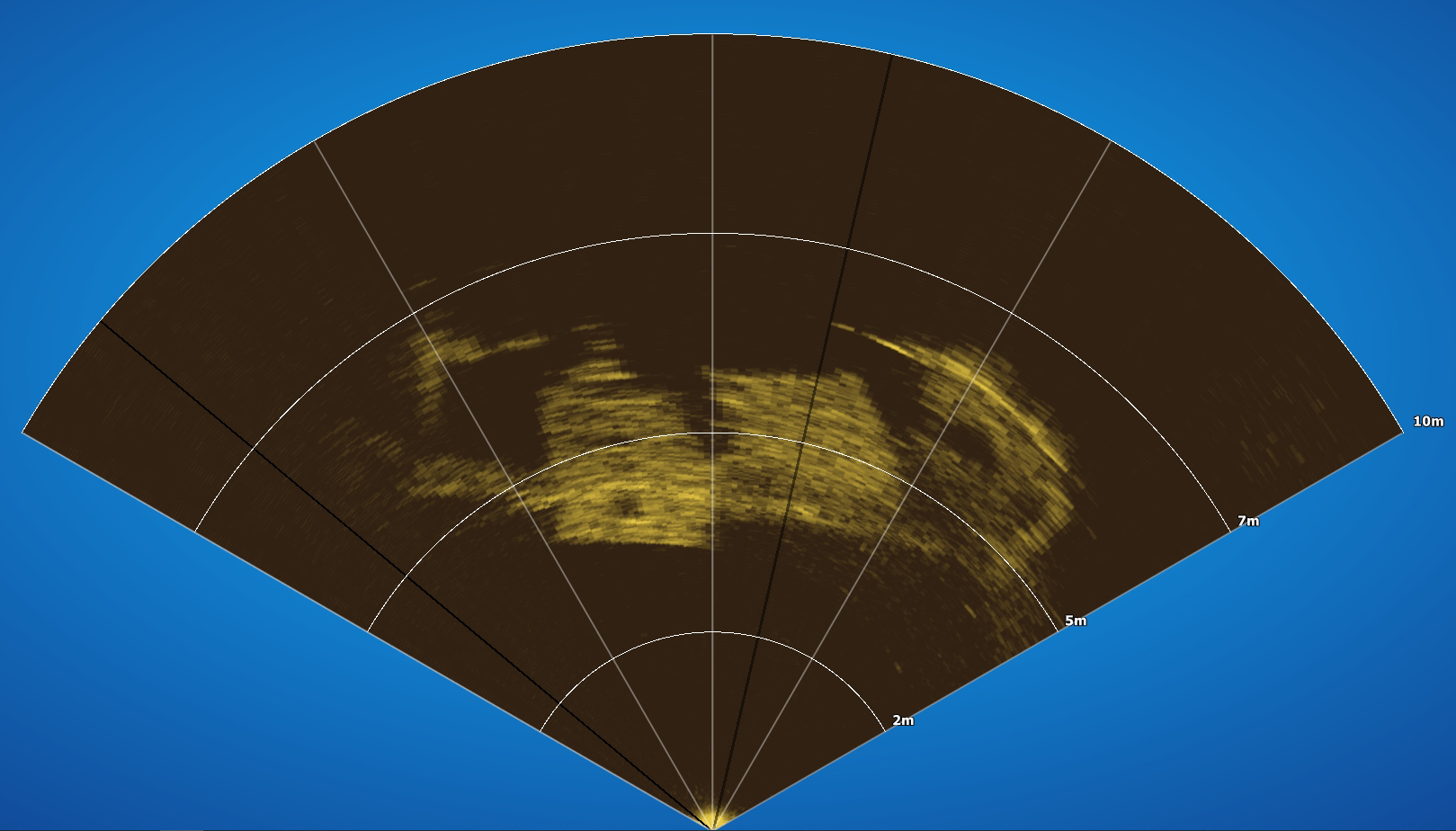
Navigating in low visibility is not easy:
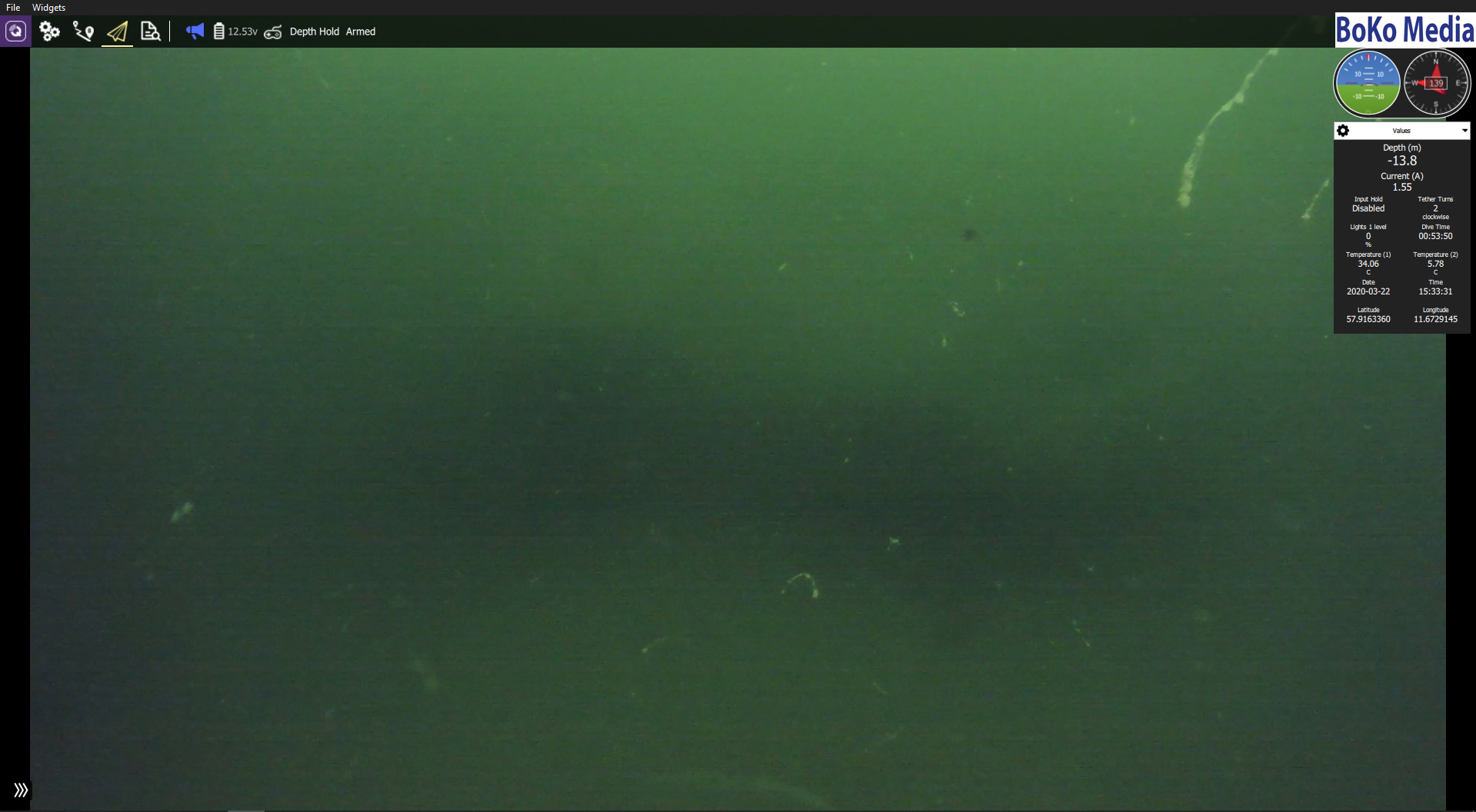
Scanning sonar makes it easier to navigate:
Texting on video, chosable after recording!

Or use same video without texting:

Working at +100 meters, showing Lophelia reefbuiling corals:

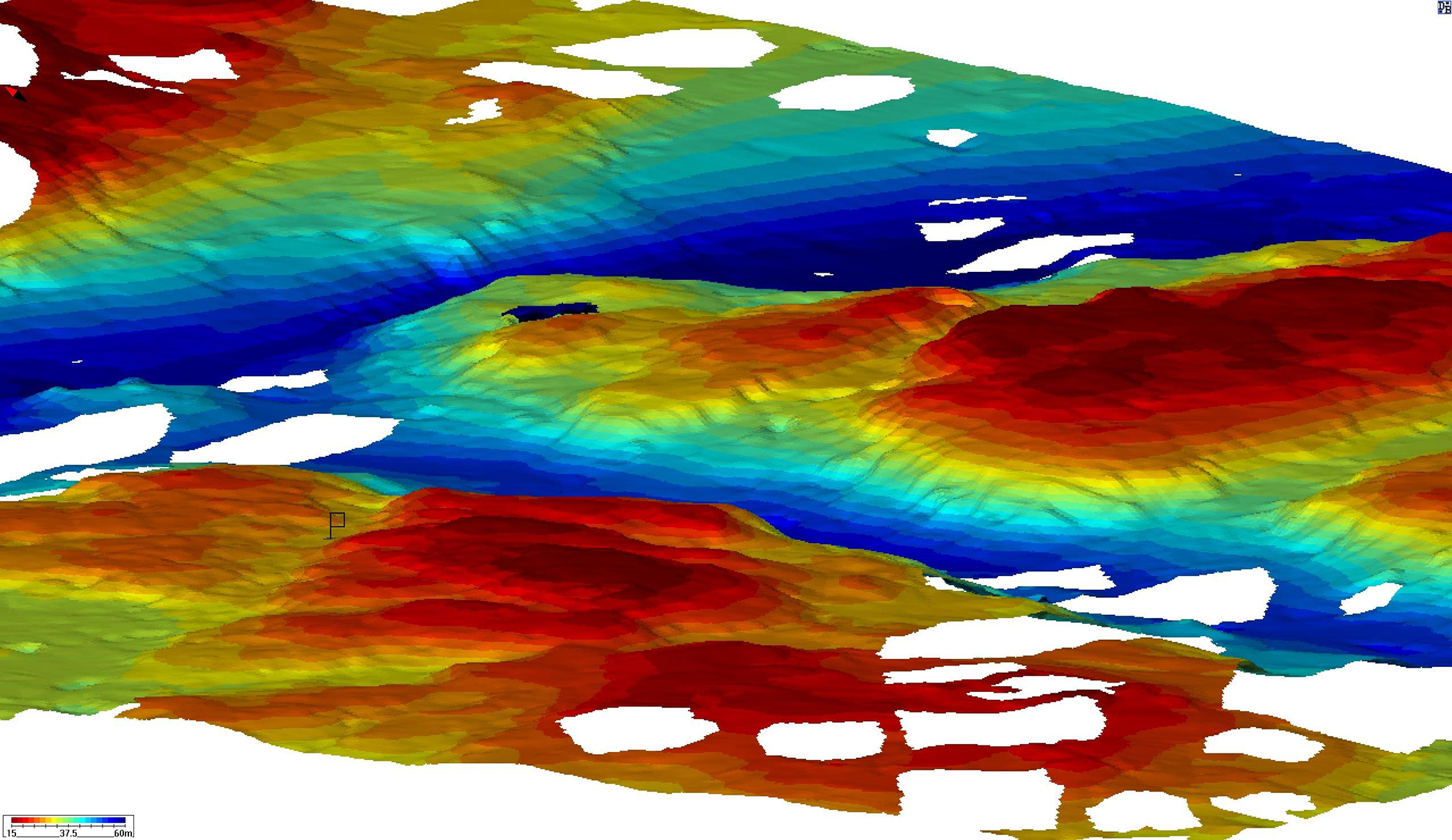
Mapping bottom cost effective:

Basic example of mapping:
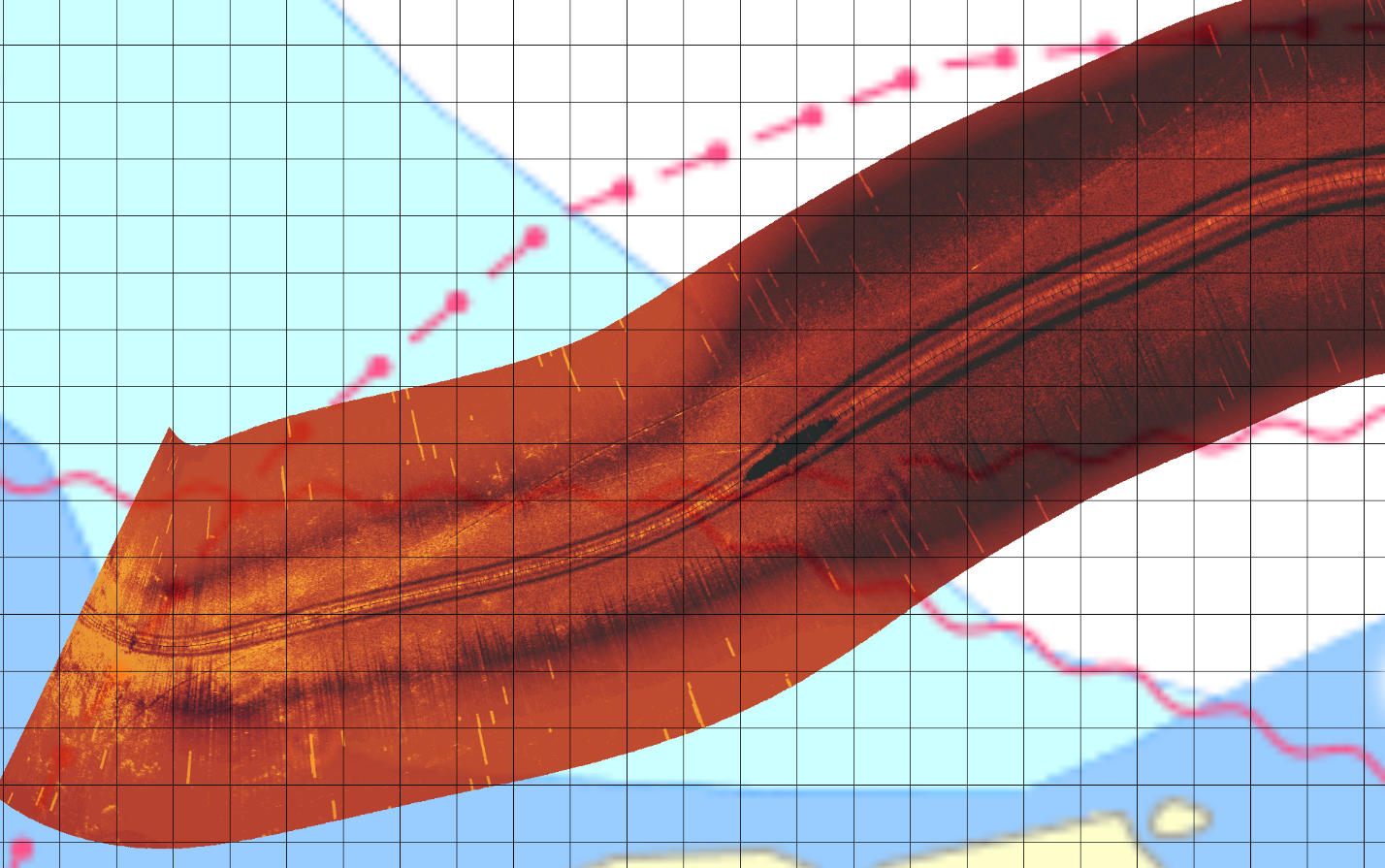
Sidescan showing pipes not where they are marked
on navchart:
Quick automated
multiphoto Eeelgrass
survey with Air Drone:

Check with
Sidescan, Eelgrass ends where seabed deepens:
Verifying with
ROV:

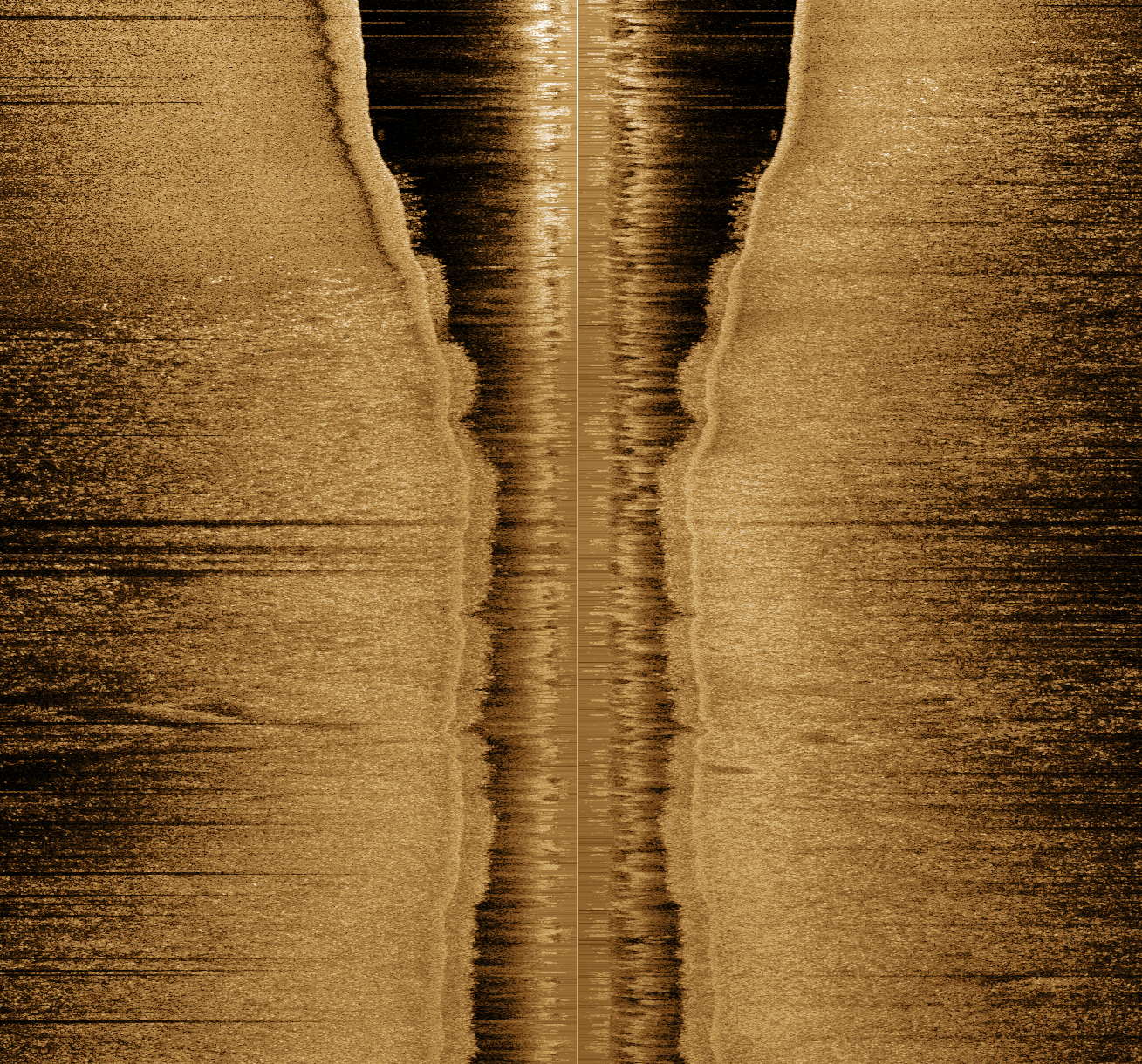
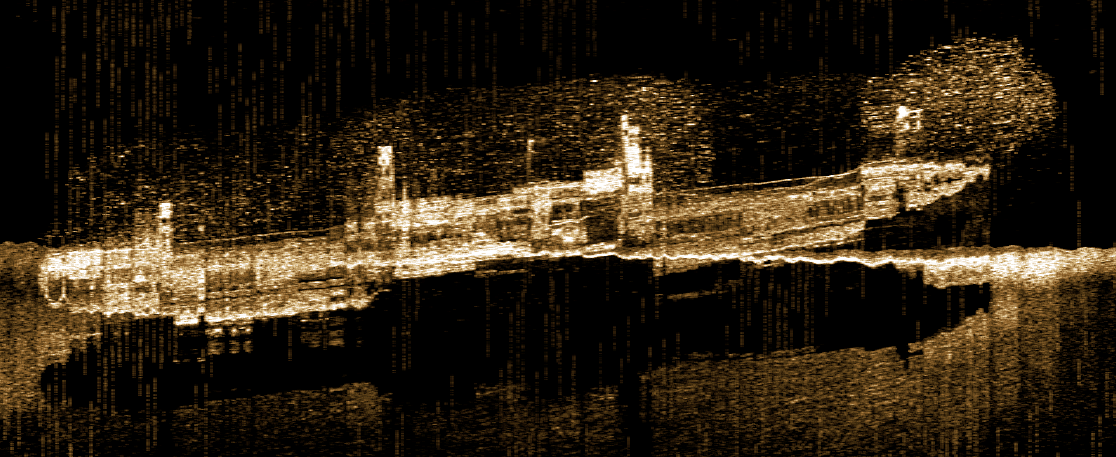
Sidescan
Tool to image objects on seabed
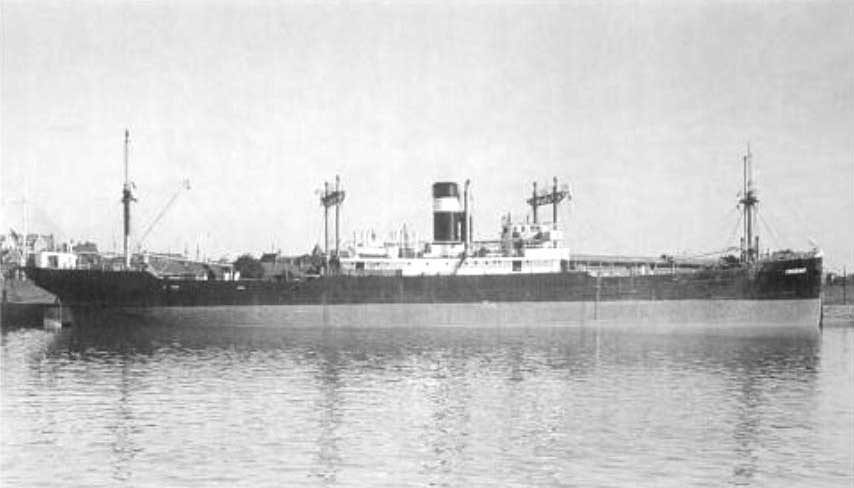
Steamer sunk in Swedish waters april 1940:
Wreck today from Sidescan:
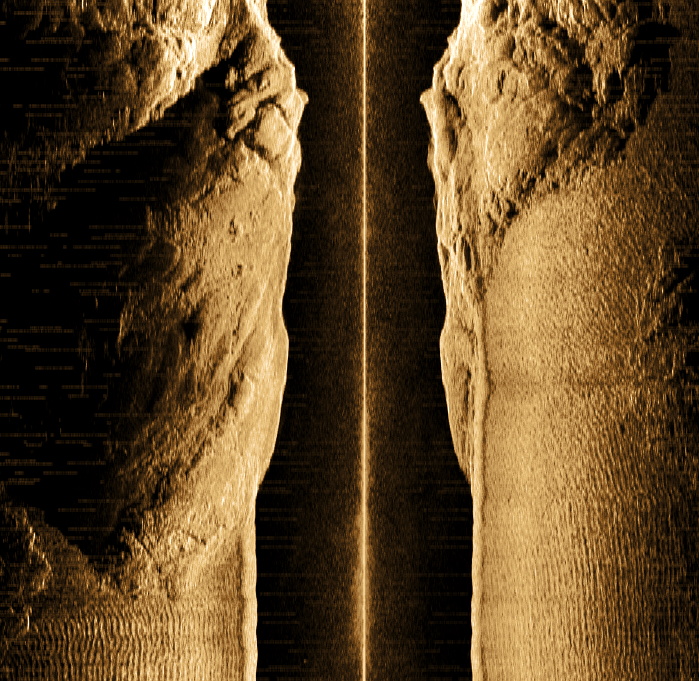
Bottom with
Sidescan, sand and rock:
Videos from use 
Till Huvudsida igen